如何理解“复合位置度”
- 2019-02-27 10:37
0 - 7699
- 手机查看
复合位置度概念源于美国标准ASME Y14.5,是美标GD&T的难点之一。美资制造商或与美资制造商有业务关系的中国工程师,尤其需要正确的理解和应用复合位置度。
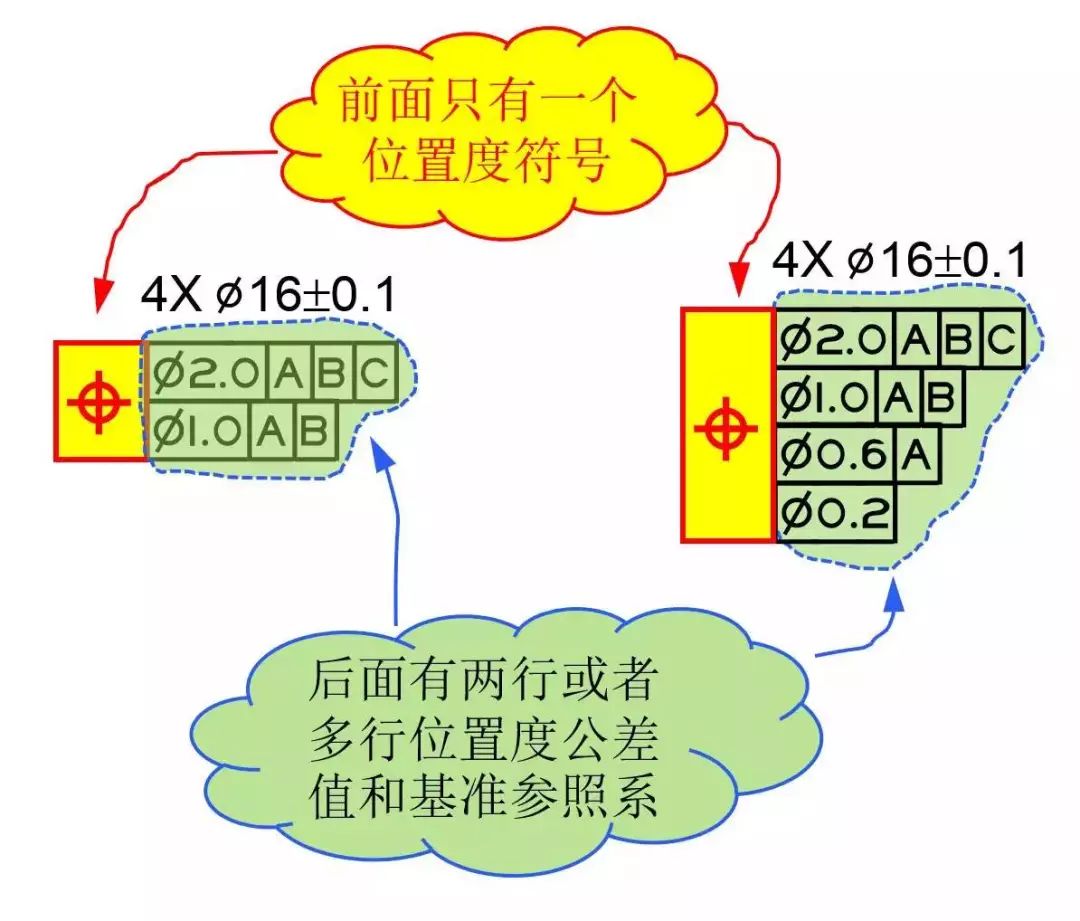
复合位置度与普通位置度的区别——
复合位置度与普通位置度的区别在于,可以在满足产品功能的前提下,尽可能的放宽产品的相应公差要求:根据产品功能需求,对孔组相对于基准的整体位置公差设定,可以比较宽松;对于孔组相对于基准的整体方向以及组内各孔相互位置公差,可以依次减小;即在满足功能的前提下,该放宽就放宽。
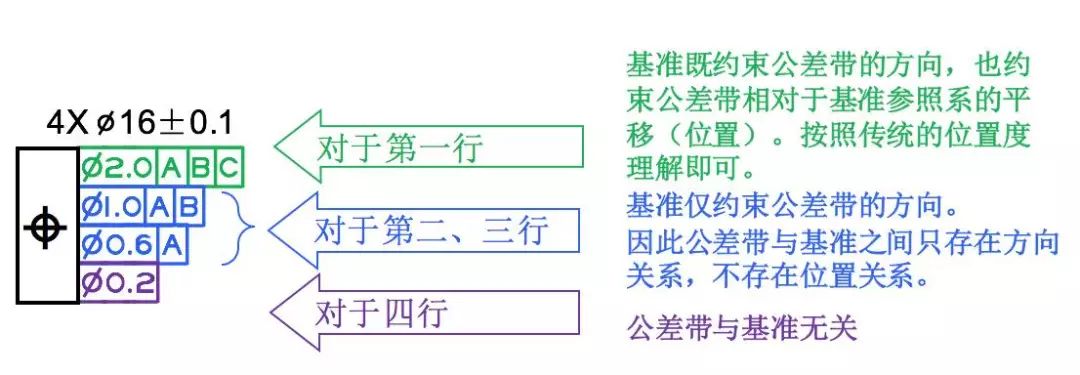
复合位置度中基准与公差带之间的约束关系
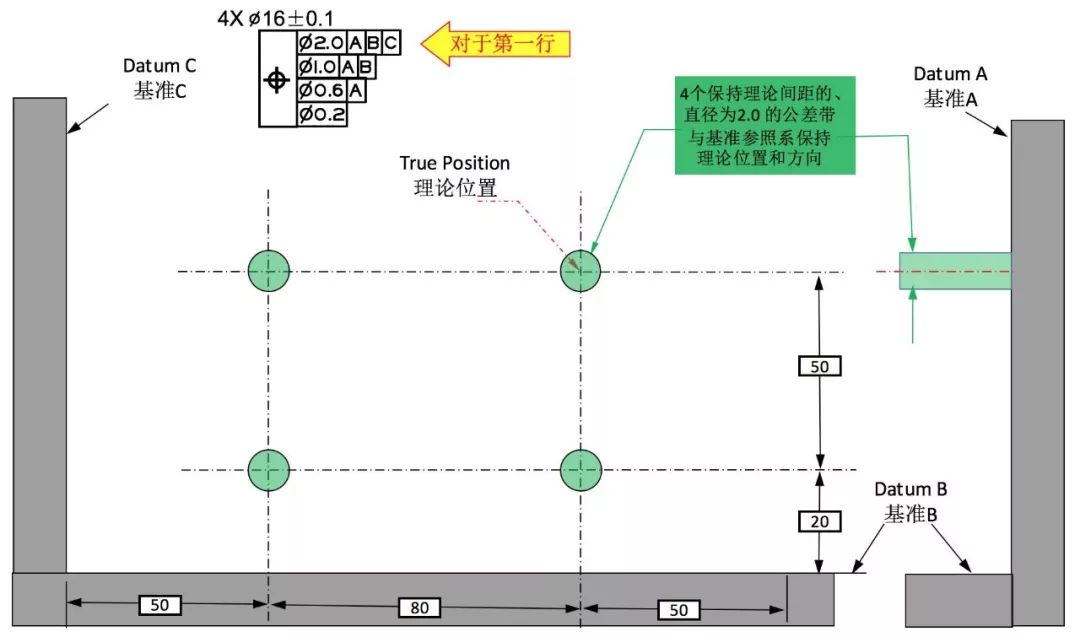
复合位置度的第一行,按照传统的位置度理解即可:基准既约束公差带的方向(旋转自由度),也约束公差带的位置(平移自由度)。
除了第一行,复合位置度的其他行:基准仅约束公差带的方向(旋转自由度),不限制公差带位置(平移自由度)。
最后一行没有基准的情况:公差带与基准没有任何关系。
如图所示:
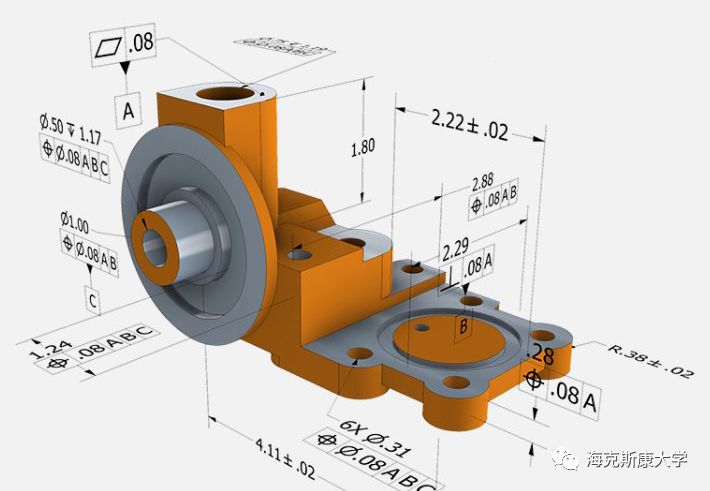
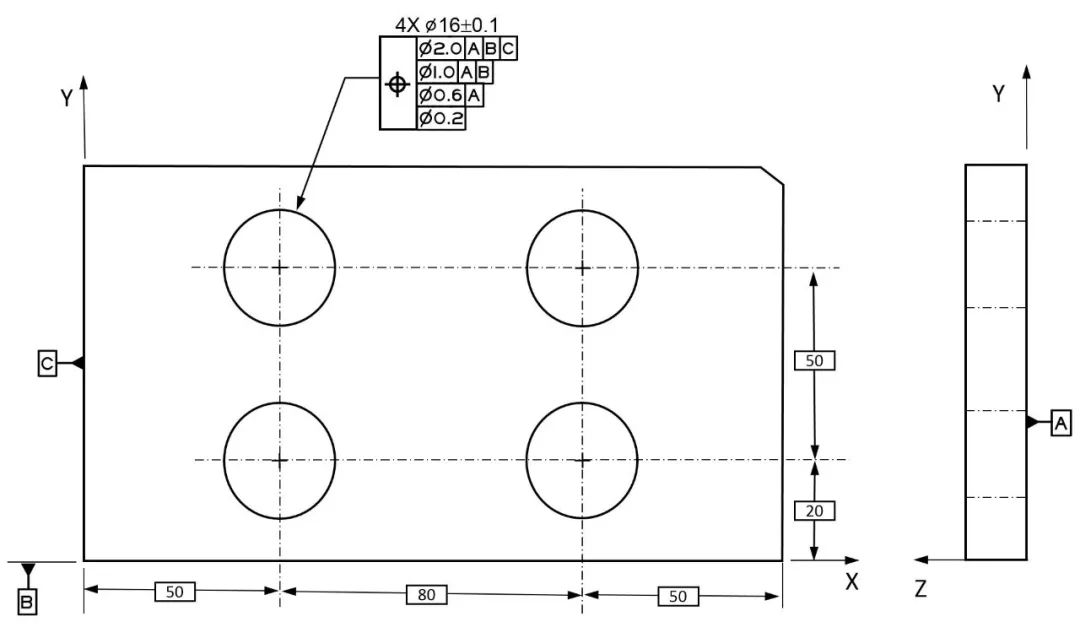
一个复合位置度的实例
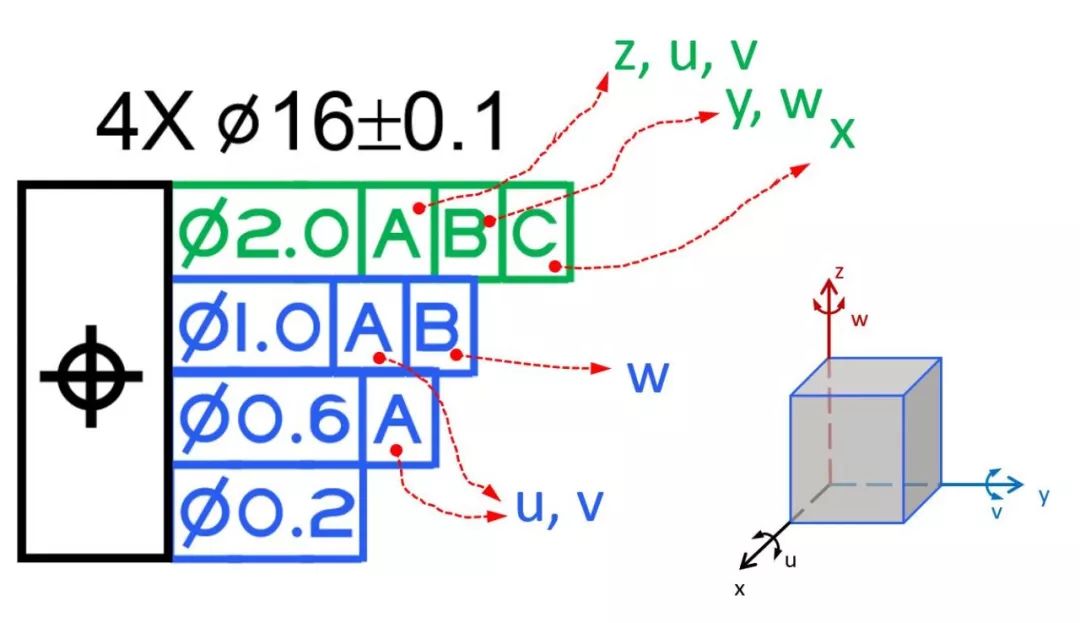
在笛卡尔坐标系中,一个特征有6个自由度:沿X\Y\Z的平移自由度(用x\y\z表示),和绕X\Y\Z旋转的自由度(分别用u\v\w表示)。如下图所示的复合位置度标注,我们如何理解呢?
第一行:基准约束与普通位置度一样,可约束位置与方向
第一基准A约束三个自由度——z(Z轴平移),u(X轴旋转),v(Y轴旋转);
第二基准B约束两个自由度——y(Y轴平移)、w(Z轴旋转);
第三基准C约束最后一平移自由度——“x(X轴平移)”。
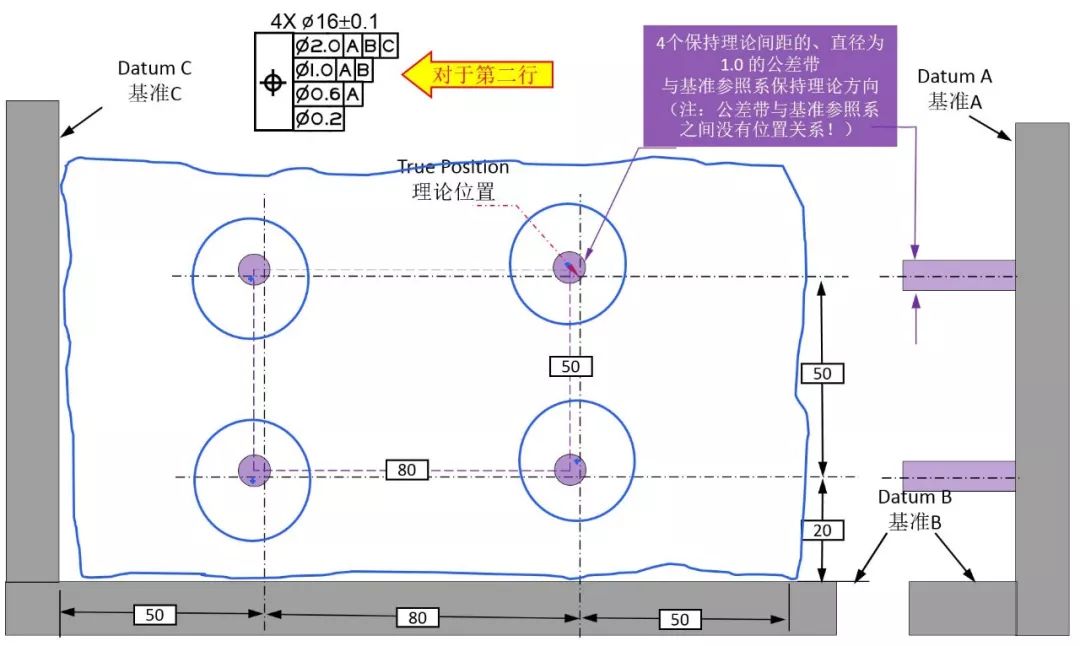
第二行:基准只约束公差带方向
第一基准A约束两个旋转自由度“u,v”
第二基准B约束一个旋转自由度“w”
即直径为1.0的四个圆柱公差带相对于基准参考坐标系可以整体沿X、Y、Z轴平移,但不能绕X、Y、Z三个轴旋转。
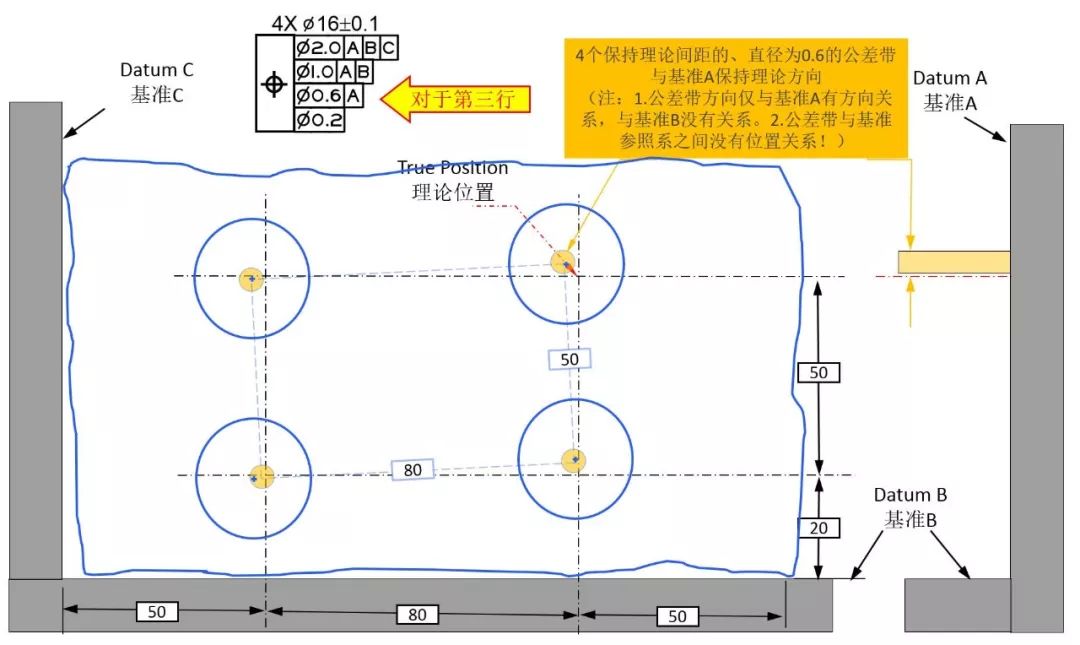
第三行:基准只约束公差带方向
第一基准A约束的是两个旋转自由度“u,v”
即直径为0.6的四个圆柱公差带不能绕X或Y轴旋转,但可以绕着Z轴旋转,也可相对于基准参考坐标系整体平移。
第四行:没有任何基准,无需与基准参考坐标系保持任何关系
可以理解为直径为0.2的四个圆柱形公差仅需保持相互的理论位置。
每一行公差带与基准之间的具体关系描述如下图:
对于该复合位置度标注的具体解释如下:
1. 第一行,控制孔组整体相对于基准的位置和方向(包括各孔相互位置)。
2. 第二行,孔组整体对于基准A和B的方向进行更严格的管控(也包括各孔相互间的位置),与基准坐标系没有位置关系;四个保持位置关系的孔组可以沿三个轴平移,但不能旋转;
3. 第三行,孔组整体相对于基准A的方向进一步加深控制,可以理解为孔组“整体垂直”,可以沿Z轴旋转;与基准坐标系没有位置关系,可以平移(各孔相互位置依然包含在内);
4. 第四行,各孔之间的相互位置进一步严控,即仅控制四个孔的相互位置。
结论
理解了复合位置度的含义,可以在满足产品功能的前提下,合理明确的表达不同层次的位置要求:孔组相对于基准坐标系的整体位置,孔组相对于特定基准坐标系的整体方向,和各孔之间的相互位置等等。工厂各方人员正确理解复合位置度,将会更好的在满足产品质量(功能)的前提下,避免包含技术沟通在内的各种不必要的时间和成本浪费。
复合位置度在实际测量评价中。如果没有复合位置度的选项菜单,必须精准理解上述含义,才可以通过每行公差带与基准参考系之间的正确约束实现准确的评价。
如果使用PC-DMIS ,则没必要这么费脑洞了,因为PC-DMIS 支持美标ASME Y14.5,提供特征控制框评价模式,只需按照标注填写特征控制框,即可输出复合位置度的精确评价。

评论列表0
暂无评论


-
71
文章
-
5
评论
-
0
粉丝
-
0
点赞
最近文章
-
轮廓度评价结果差异...
带基准的轮廓度评价十分常见,在海克斯康的PC-DMIS软件中,可以对线轮廓度、面轮廓度、对称公差带、非对称公差带进行非常方便...