经验 | 什么是最小二乘拟合?
- 2022-07-07 10:57
0 - 1101
- 手机查看
空间坐标点的采集是三坐标测量的基础。任何形状都是由空间点组成,所有的几何量测量都可以归结为空间点的测量。
坐标点拟合:坐标点数据需要经过计算机处理,拟合形成测量元素,比如直线、平面、圆、圆柱、圆锥等等,再经过特定的数学计算方法得出其形状、位置公差以及其他几何量数据。
首先,为了简化问题难度我们将三维问题变为二维问题,只考虑XY坐标。在圆柱上任一截面,每间隔18°取一个测量点,一共取20个测量坐标点,并在XOY坐标系里表示出来:
上面的图看起来是一个圆,但是问题没这么简单。这个世界上有一种东西叫误差,而误差是绝对存在的。简单来说,由于误差的存在,实际存在的东西和理论形状是有偏差的,比如说我们平时看到的平面,在微观尺度下是这样的:
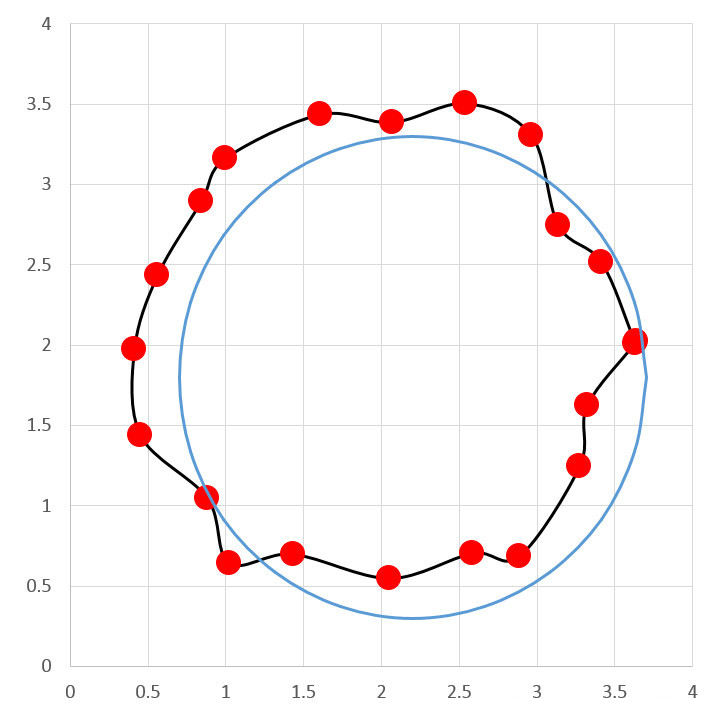
同样,由于机床本身的误差外加装夹误差、加工热误差、振动误差等原因。被加工圆实际上也不是理想圆,只是因为误差本身数值很小,肉眼难以分辨。为了能让大家形象的观察到误差的存在,我们把刚才被测圆数据的误差放大几百倍,看似完美的圆就变成了下面的不规则多边形(实测圆):
此时,我们不难看出,这些实测坐标点似乎不像一个圆。但是,它又的的确确是一个实际圆棒上的坐标值。问题来了:它的直径是多少?它的圆心又在哪里?
那么,此时我们需要找一个理想的圆,来表示出这个实际上并不理想的圆,这个过程就是前面提到的坐标点拟合。接下来就是拟合的实现过程:
首先,我们的任务是要找到一个理想圆来表示实际上有缺陷的圆。那么,找圆的方法有很多,比如可以这样找:
还可以这样找:
但是上面的两种找圆的方法似乎不是很理想。那么,有没有一种比较理想的方法能够找出一个最合理的圆,最能够代表实际被加工的有缺陷的圆呢?我们先假设有这样一个理想圆的存在,如下图:
接下来我们来分析一下这个理想圆存在的条件:首先,对比实际测量点与理想圆相应位置点(每间隔18°位置),他们之间的距离就是加工误差,用黄色线段表示:
这个误差就是概率论与数理统计里面讲到的残余误差:
其中v表示残余误差,l表示实测点,y表示理想点。最理想的拟合圆应该能够使所有测点残余误差平方和为最小,因此应该满足如下表达式:
这个就是所谓的最小二乘法。
免责声明:本文源于网络,版权归原作者所有。如涉及版权,请联系删除。
评论列表0
暂无评论
-
24
文章
-
24
评论
-
0
粉丝
-
0
点赞
最近文章
-
ASME Y14.5和ISO 5...
作者:海克斯康培训中心 逄淑昭前言几何公差是一种在国际上被广泛使用的符号性工程语言,明确且精确定义了几何产品功能的尺寸...